Select a face on the model.
The torque will be transmitted to the entire highlighted region.
In the balloon, select torque  . .
Rotate the robot to define the direction of the torque.
To define the torque magnitude: - Click the existing magnitude next to the robot.
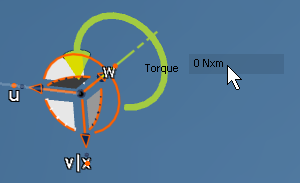
- Type a new magnitude into the text field.
- Press Enter or click the background of the viewport to commit the magnitude.
To complete the torque definition:
-
Click the background to commit the torque, or
- Click a new face to commit the current torque and begin a new torque definition.
To edit a torque after it has been created, double-click the load's glyph in the model. To delete a torque, click its glyph and press [Delete]. The Review Panel can also be used to edit or delete torques.
|