IK (Inverse Kinematics) Behaviors | |||||||
|
| ||||||
Click IK Behaviors.

Select the manikin.
The IK Behaviors dialog box for the selected manikin appears
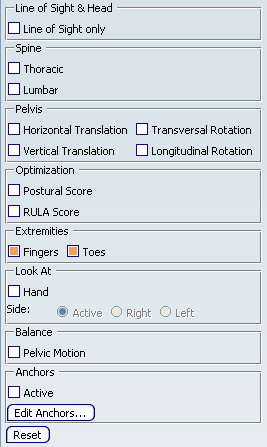
See About IK (Inverse Kinematic) Behaviors and the Dialog Box
In this dialog box, you can select various options under these headings. You can return the manikin to a standard standing pose after each example using Reset.