About IK (Inverse Kinematic) Behaviors and the Dialog Box | ||
| ||
This manipulation eventually induces spine and/or hip motion in order to translate and orient the manikin toward the target. In other words, these behaviors modifies the Inverse Kinematics chain, making it local (limbs only) or global (limbs and spine and pelvis).
IK Worker Frame mode This mode behaves in the same manner except the compass is oriented in the worker (global) frame.
IK Segment Frame mode In this mode, any segment selection made in the 3D environment automatically snaps the compass to the associated segment IK control point. The compass is oriented in the segment frame.
Two commands are available in Inverse Kinematics mode and either may be used depending on the need or the operation to be performed (making a new posture or fine-tuning an existing posture). Both commands provide easy access to manikin Inverse Kinematics capabilities. The only difference between the two is in the compass orientation. These commands are mutually exclusive; activating one automatically deactivates the other.
This scenario shows the Manikin Left Hand selected.
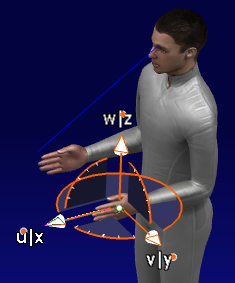
The manikin's Inverse Kinematics behavior is currently the default Limb Inverse Kinematics chain. If no other behavior option is selected, the Inverse Kinematics manipulators, i.e., Inverse Kinematics Mode, Reach Mode, drives the arms and legs in order to simulate natural motion.
Note that all the options are not mutually exclusive; more than one item can be activated at the same time. For example, activating both the Thoracic and Lumbar options initiate motions of the entire spine if the target cannot be reached by extending the arms.
If multiple Pelvis options are selected, the manikin's pelvis moves (translate, rotate, or laterally orient, depending on the option selected) with or without preliminary spine motion, depending on the selection status of the Spine option.
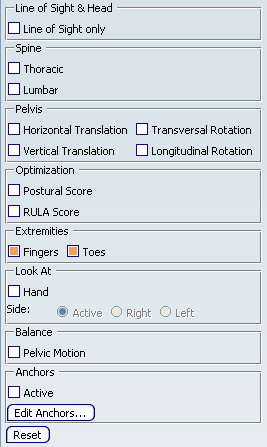
The IK Behaviors dialog box.
| Command | Description |
|---|---|
| Line of Sight & Head options | When selected, the Manikin's vision's line of sight is directed at what the manikin's hands are reaching. In other words, its like the line of sight follows the movement of the compass in the Reach or Inverse Kinematics mode when involving the hands. The head stays stationary. Deactivating this function, and setting the tools / options, the head also follows the line of sight. This option is enabled in the Tools / Options menu. See The Manikin eyes follow the 3D compass with Reach and Inverse Kinematics Mode . |
| Spine | Select both the Thoracic and Lumbar spine options and OK. You should still be in Inverse Kinematics Mode. Again move the left hand. The behaviors of the moving sections of the spine are evident.
|
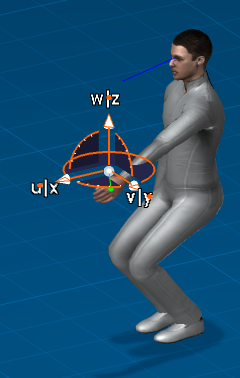
| Pelvis | Re-open the Properties dialog box and de-activate the Spine options. Horizontal Translation Activate Horizontal Translation, select both manikin's feet first, as to fix them into place, then select the manikin's left hand. Move the manikin's left hand upward and to the front; observe the Inverse Kinematics behavior. When Horizontal Translation is active, the manikin's hip moves forward as the compass is dragged.
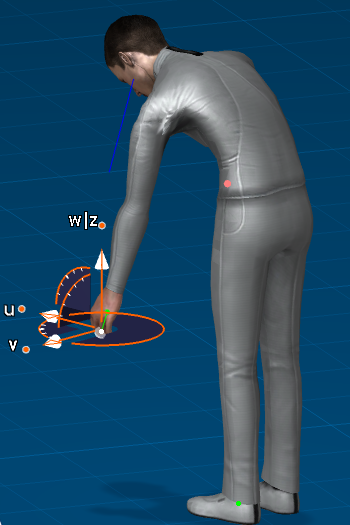
Vertical Translation In the Properties dialog box, de-activate Horizontal Translation and activate Vertical Translation. Select both manikin's feet to fix them in place then select the manikin's left hand. Drag the compass downward and observe the Inverse Kinematics behavior. When Vertical Translation is active, the manikin's hip moves down (the manikin squats) as the compass is dragged.
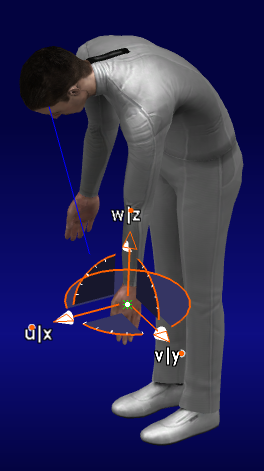
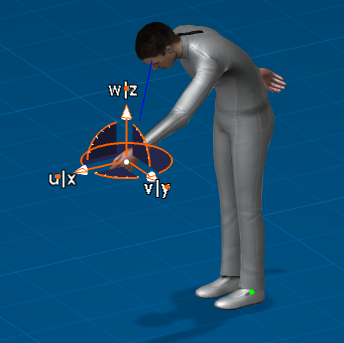
Transversal Rotation In the Properties dialog box, de-activate Vertical Translation and activate Transversal Rotation. Select both manikin's feet to fix them in place, then select the manikin's left hand. Drag the compass forward and observe the Inverse Kinematics behavior. When Transversal Rotation is active, the pelvis rotates forward causing a stoop pose.
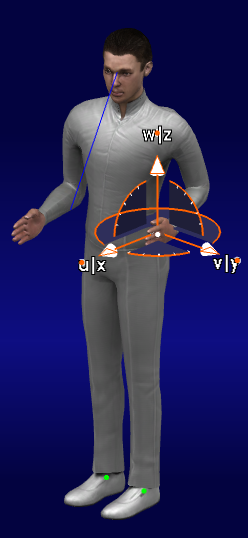
Longitudinal Rotation In the Properties dialog box, de-activate Transversal Rotation and activate Longitudinal Rotation. Select both manikin's feet fix them in place, then select the manikin's left hand. Drag the compass to the side and observe the Inverse Kinematics behavior. When Longitudinal Rotation is active, the manikin's hip twists.
|
| Optimization | This allows you to use the Analysis Introduction - Postural Score or the RULA score |
| Extremities | This allows you to lock or not, the fingers and toes. Both options are activated by default. This directly locks all segments of all the fingers and toes within IK behaviors. This is a temporary lock and segment are only locked while resolving IK. |
| Look At | This enables you to look at the compass, when moving their hands. |
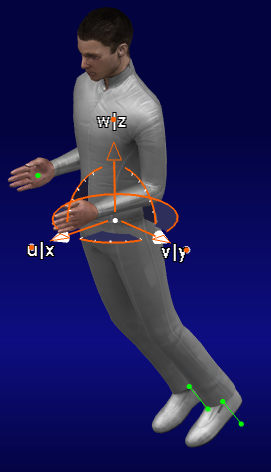
| Balance | This option enables you to manipulate the manikin with inverse kinematics while keeping the manikin in balance. When these options are selected (only one may be chosen at a time), the balance is checked, in real-time, every time the posture of the manikin changes. Pelvis Motion In the Properties dialog box, retain all the settings under the Spine and Pelvis headings. Under the Balance heading, activate Pelvis Motion. Select the manikin's left hand. Drag the compass forward and down. With the Pelvis Motion option activated, when the manikin loses balance, the pelvis tips in order to keep the balance (keep the center of gravity inside the base of support).
Repeat this procedure using the Inverse Kinematics
Segment Frame mode
|
| Anchor | Fix constraints was used to fix a segment of the manikin in a specific location in the space (3D position) while you were moving the manikin. When the inverse kinematics was not able to resolve a position with the constraint, the segment was moved but the target position was kept. The concept of anchor is similar to fix constraint except for the following difference: An anchor doesn't allow a segment to move out of its target position in order to satisfy the resolution of another target. Unlike fix constraint, no twin segment or line between the target and the segment is displayed because the segment never moves. Here are the specifications of anchors: No specific location in the space is assigned to an anchor. If you move the manikin without the usage of the IK, the anchor won't have any effect just like they would be deactivated. Anchors are considered as options of IK Behaviors, thereby anchors affects the behavior of inverse kinematics when using the following commands: Command Active Forward Kinematics No Inverse Kinematics Yes Reach Yes Standard Pose No IK Behaviors options for anchors is saved in a manikin's setting. -There are 3 types of Anchors: position, direction and frame (position and orientation). The anchors have to be active in Human Builder and also in Human Task workbenches like other IK Behaviors. The anchors can be added to predefined segments (line of sight, index, thumb, hand, elbow, ankle and toes) Edit Anchors dialog: When you open it for the first time it shows the list of segments on which you can add an anchor. After selecting a line, you can click either the first or second column to add or remove selected anchor. When an anchor is added, its state turns on and the default type is set at Position and orientation. When you remove the anchor the line is cleared except for the segment name. You can also click the third column to change the type of the anchor.
|
 to get a feel for how this command differs from the
to get a feel for how this command differs from the 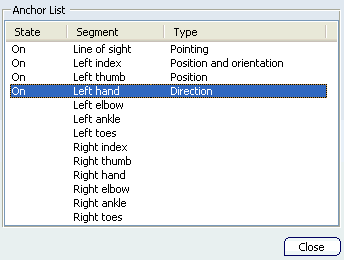
See also: IK (Inverse Kinematics) BehaviorsUsing the Manipulation, Ik Worker, and Segment Functions