About the Manipulation, Ik Worker, and IK Segment Frame Commands | ||
| ||
Concepts of the Manipulation Mode
This describes the concepts of the Manipulation mode.
This command integrates the all the benefits of each manipulation command inside one mode. 
There are actually 5 different manipulation commands for changing the posture of the manikin: IK Mode, Reach Mode, FK Mode, Posture Editor and Standard Pose. All these commands are independent and have a very specific mode of operating . Some of them, like the IK Mode and the Reach Mode, can be tuned by changing the combination of the IK behavior options.

The Integrated Manipulation Mode includes the following features:
IK Mode capabilities with specific IK behaviors settings
All IK Mode capabilities is integrally available in this new manipulation mode. The only difference is related to the default IK behavior settings. The IK behavior options enabled by default are the followings:
- Spine (Thoracic and Lumbar)
Anchors (Right and Left Ankles)
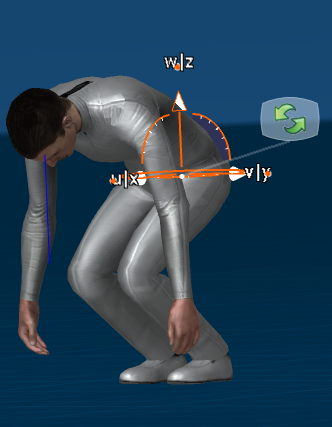
Combined Pelvis and spine rotation
For more realism, any rotations of the pelvis introduces a proportioned rotation of the spine. In other words, you are able to simultaneously stoop, lean or twist the pelvis and the spine in one mouse motion.
FK manipulator for extremities (segments)
In the Integrated Manipulation Mode, the head. toes, and fingers degrees of freedom can be interactively modified using FK manipulators. A simple click on these segments displays the corresponding manipulators.
- Elbow/knee joint rotation adjustment
A new manipulator is integrated for activating the rotation of the swivel angle of the elbow and the knee. For the elbow, this rotation corresponds exactly to the Elbow Joint motion tab of the Standard Pose manipulation tool. This is applied to the knee.
A new 3D manipulator is added near the elbows and knees joints. This manipulator is displayed while clicking on the arm. It's a semi circular and bidirectional arrow. The rotation is activated by selecting and dragging one of the manipulator end-effectors.

Gravity attraction for non-working arm(s)
- We also plan to add a new IK behavior for the non-working arm(s). It consists to simulate the gravity attraction effect the arm(s) on which there is no IK constraint. Currently, there is no change apart the
fact the non-working arm(s) keeps the vertical position while the
inclination of the trunk.




![]()
The Manikin Eyes Following the Compass in the Reach and IK Mode
Using the Manikin eyes following the compass in the reach and IK mode.
This has a natural behavior for the manikin's vision when it is performing a reach or IK on an object. The vision of the manikin is directed to the object the manikin is trying to pick up, which would be more like human behavior.
![]()
Using the 3D Mouse for IK Mode
Using the 3D mouse for the IK mode
The 3D mouse, is a new method for moving the manikin in the IK mode. The 3D mouse does not replace the regular mouse and keyboard but is used as an additional tool. For more information on how to use a 3D mouse with products, see Moving Objects Using the 3D Mouse in the Infrastructure User Guide
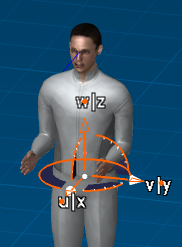
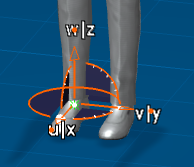
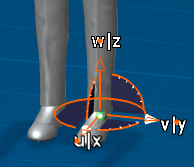
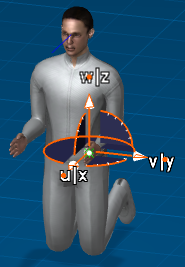
- IK Worker Frame mode The manikin coordinate system is used as the reference when using the 3D mouse to manipulate the compass in this mode. The spatial representation appears as if the user is standing behind the manikin, placing his hand on the top of the manikin's hand, foot, etc. When you push the 3D mouse button forward, the selected segment (foot, hand, head, etc.) moves forward. Moving the mouse upward produces an elevation, etc. All rotations are blocked in IK Worker Frame mode.
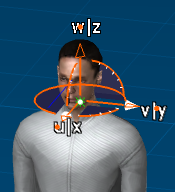
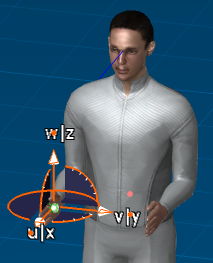
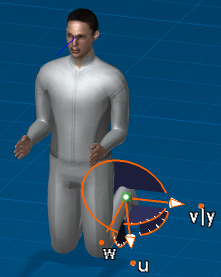
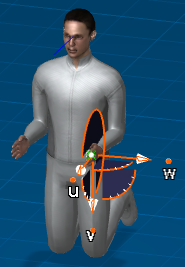
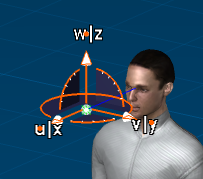
- IK Segment Frame mode In this mode, the 3D mouse is used to produce rotations of any segment. The spatial representation appears as if the user is standing behind the manikin, placing his hand in the same orientation as the manikin's hand, foot, head, etc.
