Standard Pose Dialog Box | ||||
|
| |||
Sit

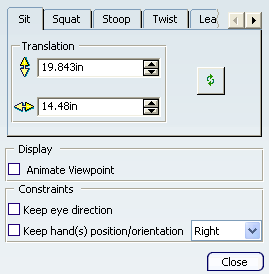
- Translation
- This tab includes two editors to quickly set the height and depth of the sitting posture.
- Display
- The Display option zooms on the manikin and changes the viewpoint in order to provide the best possible view of the working posture.
- Constraints
- Constraints can be used to freeze sections required of the manikin.
Use the Constraints check boxes to freeze the positions of the hands and the direction of vision while the rest of the manikin is moving.
Note: This option cannot be used in the Hand Grasp and the Adjust Elbow tabs.
![]()
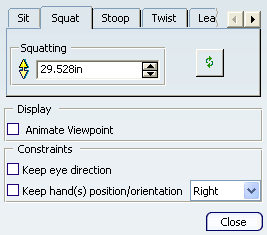
Stoop
- Stooping
- This tab includes an editor, a pelvis option,
and a trunk option.
Trunk (default): The manikin's spine can be manipulated as a whole or as sections. You can choose which section of the spine (whole spine, lumbar section, or thoracic section) to flex/extend (sagittal plane) in forward kinematics (DOF 1).

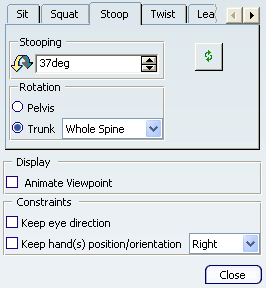
Pelvis: The manikin's trunk can be bent with pelvic rotation; the pelvis rotates around the hips. Both pelvis and trunk rotation can be performed independently of each other but cannot be used together.
Whole Spine

Thoracic Section

Lumbar Section

The stoop posture of a Manikin Human Task stores the manikin posture in terms of DOFs of the various segments. Previously the model used by HTD is not extensive to store postures relating to Pelvic bend and rotation about manikin X-axis. Therefore, additional DOFs are needed to store the pelvic bend and rotation about manikin X-axis in posture part of manikin. Previously, It was not possible to distinguish the below set of postures without the stoop angle of the manikin.
Pelvic Stoop
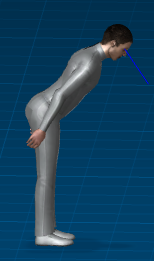
Rotation about X-axis
Pelvic Stoop
Rotation about X-axis

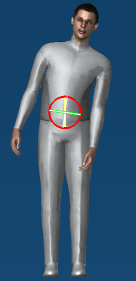
As of now these postures are identified based on the orientation of manikin X-axis and manikin Y-axis in the world co-ordinates and this is not a fool proof mechanism in copy/paste scenarios. Two attributes now are provided which store the incremental angle of rotation about the manikin-Y axis and manikin X-Axis as shown in the picture below. The default value of these attributes is zero.
The attribute storing the incremental rotation about manikin Y-axis is populated when the stoop posture is attained using the pelvic rotation in Standard Pose command. Those values also can be defined by using IK mode to manipulate manikin's pelvis.Pelvic Stoop
Rotation about X-Axis

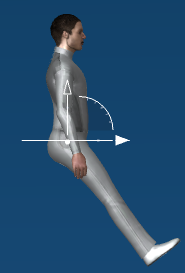
The attribute storing the incremental rotation about manikin X-axis would be populated when the manikin phantom is rotated with feet constrained on the ground in IK command as shown in the picture below.

![]()
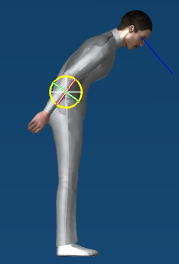
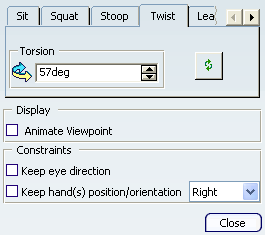
Twist
- Twist
- This tab includes an editor to quickly move the
whole spine in forward kinematics (DOF 3, i.e., left/right
rotation).

![]()
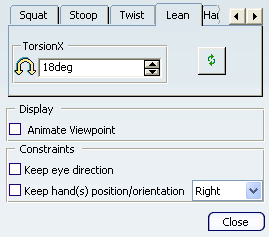
Lean
- TorsionX
- This tab includes an editor to quickly flex the whole spine laterally in forward kinematics (DOF 2, i.e., lateral flexion).

![]()
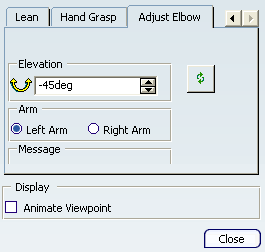
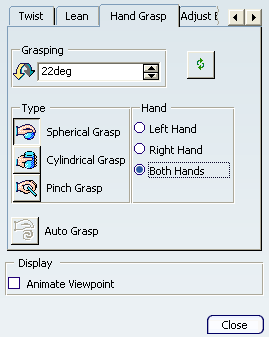
Hand Grasp
- Hand Grasp
- Three
types of hand grasps are included in this option: cylindrical
grasp, spherical grasp, and pinch grasp. The grasps can be done
with the left or right hands independently, or with both hands
together. Use the editor to loosen or tighten the grasp.
This option can be used with the forearm model.
Constraints are not available in this tab.

This dialog box works in conjunction with the Manikin Hand Grasp Toolbar.
See Concepts of the Auto Grasp
Cylindrical Grasp

Spherical Grasp

Pinch Grasp