Stop Manipulation on Clash | |||||
|
| ||||
The Manipulation Parameters dialog box appears.
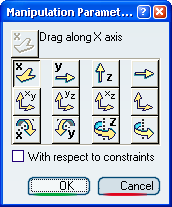
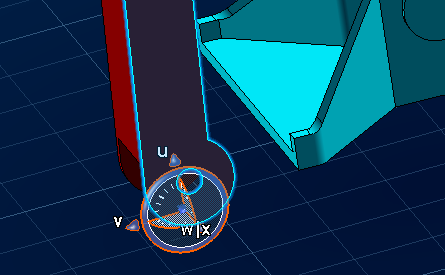
Press and hold down the Shift key, select v/z axis on the compass, then drag and drop the component so as to obtain this clash:
The components involved in the clash are now highlighted to facilitate your work.
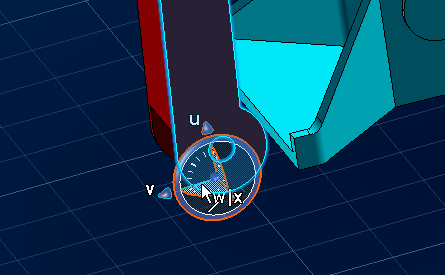
Move the component slowly from right to left, then from left to right to repeat the clash.
The application stops the move operation just before the clash occurs.
Repeat the operation more quickly: the operation is stopped earlier, which makes the gap larger between both components.
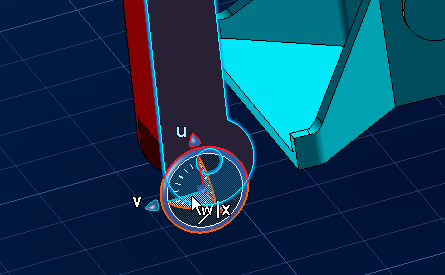
What you need to know is that the more slowly you handle the mouse, the smaller the distance between the components will be.
To quit the command, simply click the Manipulation on Clash
 .
.