Using the Reach Envelope | |||
| |||
Click Computes a reach envelope
 .
.Select the manikin's left hand or any segment belonging to the hand.
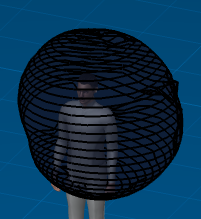
The reach envelope, a surface representing the maximum reach limit, is created around the shoulder joint.
Note: The reach envelope computation takes the IK offset of the selected segment into account. (For more information about offset functionality, see Creating, Redefining, Selecting Segment Offsets) This enables you to create the reachability of the tip of a tool, for example, if the offset of the hand had previously been relocated to that point on the tool. The reach is also influenced by the arm's angular limitations and preferred angles.
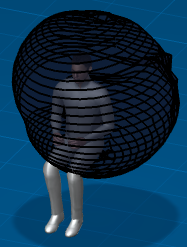
Manipulate the manikin's spine using the Posture Editor, the IK Mode, or the Standard Pose command.
The reach envelope follows.
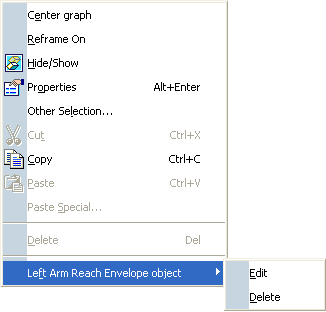
Right-click on the reach envelope and select from the contextual menu Delete to delete the reach envelope.